













Shopping cart is empty!
All Projects, Automation Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Mechanical Projects, Solar Based Projects, Robotics Based Projects
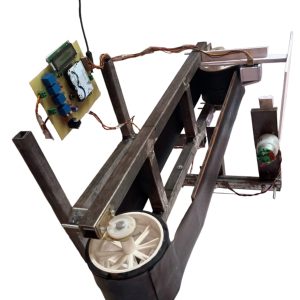
AUTOMATIC SOLAR PANEL CLEANING ROBOT USING ARDUINO
4.6 ★
4.6 ★
15 Ratings
5 ★
9
4 ★
6
3 ★
0
2 ★
0
1 ★
0
(15)
Highlights:
The Solar energy is the most abundant source of energy for all the forms of Life on the planet Earth. Solar is the basic source of renewable energy. One can generally assume a reduction of about 40% ??? 55%, if the panels are not clean properly for 1-2 months.
Highlights:
The Solar energy is the most abundant source of energy for all the forms of Life on the planet Earth. Solar is the basic source of renewable energy. One can generally assume a reduction of about 40% ??? 55%, if the panels are not clean properly for 1-2 months.
All Projects, Sensor Based Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Mechanical Projects, Solar Based Projects, Electronic Products
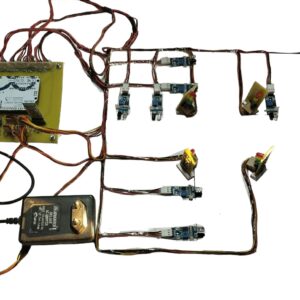
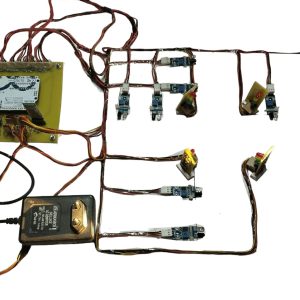
Automatic Solar Pannel Cleaning By Sensing Solar Voltage And Light Luminance
4.7 ★
4.7 ★
7 Ratings
5 ★
5
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(7)
Highlights:
The solar PV modules are generally employed in dusty environments. The dust gets accumulated on the front surface of the module and blocks the incident light from the sun. It reduces the power generation capacity of the module. The power output reduces as much as by 50% if the module is not cleaned for a month.
Highlights:
The solar PV modules are generally employed in dusty environments. The dust gets accumulated on the front surface of the module and blocks the incident light from the sun. It reduces the power generation capacity of the module. The power output reduces as much as by 50% if the module is not cleaned for a month.
All Projects, Automation Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Mechanical Projects, Bluetooth Based Projects
AUTOMATIC VERTICAL CAR PARKING SYSTEM
4.3 ★
4.3 ★
3 Ratings
5 ★
1
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(3)
Automatic zebra crossing detector
4.8 ★
4.8 ★
5 Ratings
5 ★
4
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(5)
All Projects, Sensor Based Projects, Arduino Projects, Communication, Mechanical Projects, Electronic Products
BATTERY HEALTH MONITORING OR BATTERY BLAST PROTECTION SYSTEM
4.4 ★
4.4 ★
5 Ratings
5 ★
2
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(5)
Battery Operated Power Weeder Machine
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
In this project we have T shaped chassis on the limb of “T” We have mounted driving wheel of 30 cm dia. Driven by appropriate sprocket mounted on shaft between bearing blocks. On T driving motor is mounted and it is connected through chain. Three teeth plough is fabricated and attached to main frame. Plough has given adjustment facility so that depth of ploughing can be controlled. At rear end two support wheels are mounted. Motor is connected to battery through speed controller circuit and speed is controlled by throttle handle given in the form of cart handle.
$216.36 $240.40 10% Off
Highlights:
In this project we have T shaped chassis on the limb of “T” We have mounted driving wheel of 30 cm dia. Driven by appropriate sprocket mounted on shaft between bearing blocks. On T driving motor is mounted and it is connected through chain. Three teeth plough is fabricated and attached to main frame. Plough has given adjustment facility so that depth of ploughing can be controlled. At rear end two support wheels are mounted. Motor is connected to battery through speed controller circuit and speed is controlled by throttle handle given in the form of cart handle.
BATTERY OPERATED SUGARCANE BUD CUTTING MACHINE
5 ★
5 ★
1 Rating
5 ★
1
4 ★
0
3 ★
0
2 ★
0
1 ★
0
(1)
Battery Operated Tiller Machine
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
In this project we have implemented automation in agricultural tilling process. Tilling process includes removing unwanted weeds from farm and also sand needs to be perforated?? so that atmospheric air flows through sand. Here we have designed a single wheel cart that is driven by motor with battery. This cart pulls tiller tool as directed by operator.
$216.36 $228.38 5% Off
Highlights:
In this project we have implemented automation in agricultural tilling process. Tilling process includes removing unwanted weeds from farm and also sand needs to be perforated?? so that atmospheric air flows through sand. Here we have designed a single wheel cart that is driven by motor with battery. This cart pulls tiller tool as directed by operator.
COLOUR BASED SORTING SYSTEM
4.5 ★
4.5 ★
4 Ratings
5 ★
2
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
For sorting object in industry optical sorting is very much convenient. Colour and size are the most important features for accurate classification and sorting of product which can be done by using some optical sensors. The colour sorting machine is mainly a device that can sense the different colour of the object and assert them into their respective location.
Highlights:
For sorting object in industry optical sorting is very much convenient. Colour and size are the most important features for accurate classification and sorting of product which can be done by using some optical sensors. The colour sorting machine is mainly a device that can sense the different colour of the object and assert them into their respective location.
colour Sensor Based Projects, All Projects, Sensor Based Projects, Arduino Projects, Mechanical Projects
Colour Based Sorting System Using Conveyer Belt
4.8 ★
4.8 ★
4 Ratings
5 ★
3
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
Sorting of products is a very difficult industrial process. Continuous manual sorting creates consistency issues. a working prototype designed for automatic sorting of objects based on the color. TCS230 sensor was used to detect the color of the product and the Arduino microcontroller was used to control the overall process. The identification of the color is based on the frequency analysis of the output of TCS230 sensor. conveyor belts were used, each controlled by separate DC motors. The belt is for placing the product to be analyzed by the color sensor, belt is for moving the container, having separated the all colours in the convey belt in order to separate the products. The experimental results promise that the prototype will fulfill the needs for higher production and precise quality in the field of automation.
Highlights:
Sorting of products is a very difficult industrial process. Continuous manual sorting creates consistency issues. a working prototype designed for automatic sorting of objects based on the color. TCS230 sensor was used to detect the color of the product and the Arduino microcontroller was used to control the overall process. The identification of the color is based on the frequency analysis of the output of TCS230 sensor. conveyor belts were used, each controlled by separate DC motors. The belt is for placing the product to be analyzed by the color sensor, belt is for moving the container, having separated the all colours in the convey belt in order to separate the products. The experimental results promise that the prototype will fulfill the needs for higher production and precise quality in the field of automation.
All Projects, Arduino Projects, Communication, Mechanical Projects, Electronic Products, Bluetooth Based Projects
DENSITY BASED AND EMERGENCY PRIORITISED TRAFFIC LIGHT CONTROL
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
All Projects, Arduino Projects, Communication, Mechanical Projects, Solar Based Projects, Electronic Products
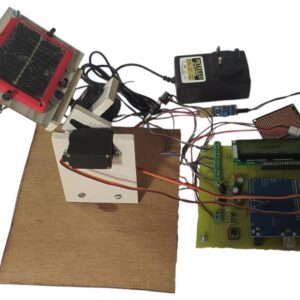
DUAL AXIS SUN TRACKING SYSTEM WITH THE WEATHER MONITORING SYSTEM
5 ★
5 ★
1 Rating
5 ★
1
4 ★
0
3 ★
0
2 ★
0
1 ★
0
(1)