









Shopping cart is empty!
All Projects, Sensor Based Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Mechanical Projects, Ultrasonic Based Projects, Robotics Based Projects, Electronic Products
KID RESCUE SYSTEAM FROM BOREWEEL
4.9 ★
4.9 ★
7 Ratings
5 ★
6
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(7)
Highlights:
The aim of this project is to give an innovative concept tohandle the bore well rescue operations. Nowadays child oftenfalls down in the borehole which is left uncovered and getstrapped. It is difficult and also risky to rescue the trappedchildren to aid in such rescue we proposed a system ofdesigning robots to the rescue of a child in a borehole.
The structure consists of power supply, switch pad, gear motors, ??concentrator, camera and Microcontroller.The condition of trapped child is captured with CCTV camera
and monitored on a TV
Highlights:
The aim of this project is to give an innovative concept tohandle the bore well rescue operations. Nowadays child oftenfalls down in the borehole which is left uncovered and getstrapped. It is difficult and also risky to rescue the trappedchildren to aid in such rescue we proposed a system ofdesigning robots to the rescue of a child in a borehole.
The structure consists of power supply, switch pad, gear motors, ??concentrator, camera and Microcontroller.The condition of trapped child is captured with CCTV camera
and monitored on a TV
Laiser Security
4.4 ★
4.4 ★
5 Ratings
5 ★
2
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(5)
Highlights:
Laser based Security System is a type of security and alarm system that uses laser light and a light sensor. A security system protects our homes, offices, banks, lockers etc. from intrusion and unauthorised access
Highlights:
Laser based Security System is a type of security and alarm system that uses laser light and a light sensor. A security system protects our homes, offices, banks, lockers etc. from intrusion and unauthorised access
LCD INTERFACE TO 8051 CONTROLLER
5 ★
5 ★
1 Rating
5 ★
1
4 ★
0
3 ★
0
2 ★
0
1 ★
0
(1)
Highlights:
This project is designed, for a LCD interfacing to micro-controller, using an 8051 family based micro-controller, for all the data and instruction on display .
Highlights:
This project is designed, for a LCD interfacing to micro-controller, using an 8051 family based micro-controller, for all the data and instruction on display .
All Projects, LDR Sensor Based Projects, Sensor Based Projects, Core Electronics Projects, Electrical Projects
LIGHT INTENSITY DEPENDENT AC LOAD CONTROL
4.3 ★
4.3 ★
4 Ratings
5 ★
1
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The aim of this project is to develop light intensity depend ac load control replaces system to include dimming feature. LDR according to achieve desired operation.
Highlights:
The aim of this project is to develop light intensity depend ac load control replaces system to include dimming feature. LDR according to achieve desired operation.
All Projects, Sensor Based Projects, Arduino Projects, IR Based Projects, Electrical Projects, Robotics Based Projects, Electronic Products, Mechatronics
LINE FOLLOWING ROBOT USING ARDUINO
4.5 ★
4.5 ★
11 Ratings
5 ★
5
4 ★
6
3 ★
0
2 ★
0
1 ★
0
(11)
Highlights:
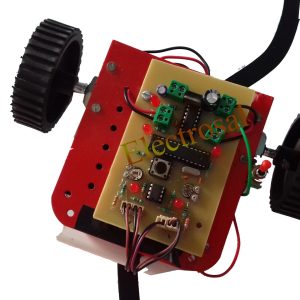
The project is designed to develop a robotic vehicle that follows a specific path. This project uses an Arduino development Board. A pair of photo sensors comprising IR transmitter and photo diode is interfaced to the Arduino to detect a specified path for its movement.
Highlights:
The project is designed to develop a robotic vehicle that follows a specific path. This project uses an Arduino development Board. A pair of photo sensors comprising IR transmitter and photo diode is interfaced to the Arduino to detect a specified path for its movement.
All Projects, IR Based Projects, Core Electronics Projects, Mini Project, School project, Robotics Based Projects, Mechatronics
LINE FOLLOWING ROBOTIC VEHICLE
4.5 ★
4.5 ★
4 Ratings
5 ★
2
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The project is designed to develop a robotic vehicle that follows a specific path. This project doesn’t require a microcontroller for its operation. A pair of photo sensors comprising IR transmitter and photo diode is used to detect the specified path for its movement.
Highlights:
The project is designed to develop a robotic vehicle that follows a specific path. This project doesn’t require a microcontroller for its operation. A pair of photo sensors comprising IR transmitter and photo diode is used to detect the specified path for its movement.
LINE TO GROUND AND LINE TO LINE FAULT DETECTION OVER IOT
5 ★
5 ★
2 Ratings
5 ★
2
4 ★
0
3 ★
0
2 ★
0
1 ★
0
(2)
Highlights:
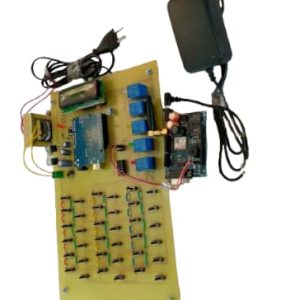
The objective of this project is to determine the distance of line to ground and line to line fault from base station in kilometers using an Arduino board over IOT. This system is a common practice followed in many urban areas. While a fault occurs for some reason, at that time the repairing process related to that particular cable is difficult due to not knowing the exact location of the cable fault. The proposed system is to find the exact location of the fault.
Highlights:
The objective of this project is to determine the distance of line to ground and line to line fault from base station in kilometers using an Arduino board over IOT. This system is a common practice followed in many urban areas. While a fault occurs for some reason, at that time the repairing process related to that particular cable is difficult due to not knowing the exact location of the cable fault. The proposed system is to find the exact location of the fault.
LINE TO LINE AND LINE TO GROUND FAULT DETECTION
4.3 ★
4.3 ★
3 Ratings
5 ★
2
4 ★
0
3 ★
1
2 ★
0
1 ★
0
(3)
Highlights:
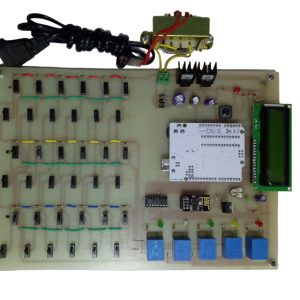
The objective of this project is to determine the distance of line to ground and line to line fault from base station in kilometers using an Arduino board. This system is a common practice followed in many urban areas. While a fault occurs for some reason, at that time the repairing process related to that particular cable is difficult due to not knowing the exact location of the cable fault. The proposed system is to find the exact location of the fault
Highlights:
The objective of this project is to determine the distance of line to ground and line to line fault from base station in kilometers using an Arduino board. This system is a common practice followed in many urban areas. While a fault occurs for some reason, at that time the repairing process related to that particular cable is difficult due to not knowing the exact location of the cable fault. The proposed system is to find the exact location of the fault
LINE TO LINE LINE TO GROUND CABLE FAULT DETECTION OVER GSM.
4 ★
4 ★
2 Ratings
5 ★
0
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(2)