










Shopping cart is empty!
All Projects, Automation Projects, Android Projects, Mechanical Projects, Robotics Based Projects, Mechatronics
360 Degree Steering Mechanism
4.8 ★
4.8 ★
4 Ratings
5 ★
3
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
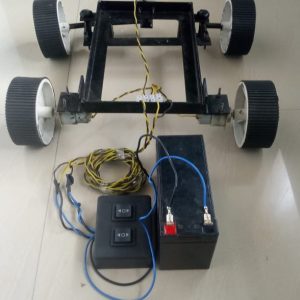
Main objective of this project is to develop a steering mechanism that vehicle will be steered at single position.
₹17,000.00 ₹20,000.00 15% Off
Highlights:
Main objective of this project is to develop a steering mechanism that vehicle will be steered at single position.
ACKERMAN STEERING MECHANISM
4.5 ★
4.5 ★
2 Ratings
5 ★
1
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(2)
Highlights:
There are many types o steering mechanisms used in automotive vehicles. In this project we have made prototype of Ackerman steering mechanism.
₹9,500.00 ₹10,500.00 10% Off
Highlights:
There are many types o steering mechanisms used in automotive vehicles. In this project we have made prototype of Ackerman steering mechanism.
All Projects, Electrical Projects, Mechanical Projects, Embedded Projects, Micro Controller, Mechatronics
ADVANCE CAR JACK CONTROLLED BY RF WIRELESS DEVICE
4.5 ★
4.5 ★
12 Ratings
5 ★
6
4 ★
6
3 ★
0
2 ★
0
1 ★
0
(12)
Highlights:
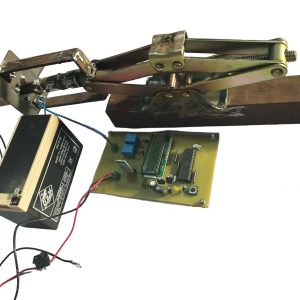
The project is designed to control the direction of car jack by using a RF technology for remote operation with a transmitter and receiver. The direction of the DC motor is depending on signal which is coming from transmitter. Hence, if the relay 1 & relay 4 gets ON then the motor rotates in forward direction. And if relay 2 & relay 3 gets ON then the motor rotates in backward direction.
Highlights:
The project is designed to control the direction of car jack by using a RF technology for remote operation with a transmitter and receiver. The direction of the DC motor is depending on signal which is coming from transmitter. Hence, if the relay 1 & relay 4 gets ON then the motor rotates in forward direction. And if relay 2 & relay 3 gets ON then the motor rotates in backward direction.
All Projects, Android Projects, Mechanical Projects, Core Electrical Projects, Bluetooth Based Projects
Android Controlled Car Jack
4.2 ★
4.2 ★
5 Ratings
5 ★
1
4 ★
4
3 ★
0
2 ★
0
1 ★
0
(5)
Highlights:
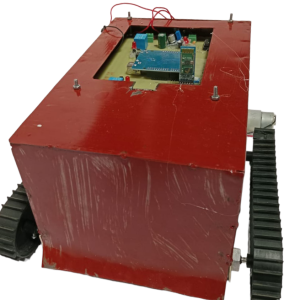
The project is designed to control the direction of car jack by using an android phone with the help of Bluetooth device. The direction of the DC motor is depending on the signal which is coming from mobile. Hence, if we press UP, this is present on your mobile then the relay1 & relay4 gets ON, so the motor rotates in forward direction. And if when we press DOWN from mobile the relay2 & realy3 gets ON then the motor rotates in backward direction.
Highlights:
The project is designed to control the direction of car jack by using an android phone with the help of Bluetooth device. The direction of the DC motor is depending on the signal which is coming from mobile. Hence, if we press UP, this is present on your mobile then the relay1 & relay4 gets ON, so the motor rotates in forward direction. And if when we press DOWN from mobile the relay2 & realy3 gets ON then the motor rotates in backward direction.
All Projects, Sensor Based Projects, Arduino Projects, Communication, Mechanical Projects, Electronic Products, Mechatronics
ANDROID CONTROL SOLAR PANEL CLEANING ROBOT
4.4 ★
4.4 ★
5 Ratings
5 ★
2
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(5)
All Projects, Android Projects, Electrical Projects, Mechanical Projects, Embedded Projects, Micro Controller, Bluetooth Based Projects
ANDROID CONTROLLED CAR JACK
4.4 ★
4.4 ★
14 Ratings
5 ★
7
4 ★
6
3 ★
1
2 ★
0
1 ★
0
(14)
Highlights:
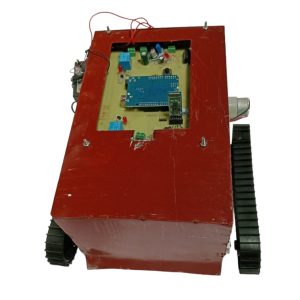
The project is designed to control the direction of car jack by using an android phone with the help of Bluetooth device. The direction of the DC motor is depending on the signal which is coming from mobile. Hence, if we press UP, this is present on your mobile then the relay 1 & relay 4 gets ON, so the motor rotates in forward direction. And if when we press DOWN from mobile the relay 2 & relay 3 gets ON then the motor rotates in backward direction.
Highlights:
The project is designed to control the direction of car jack by using an android phone with the help of Bluetooth device. The direction of the DC motor is depending on the signal which is coming from mobile. Hence, if we press UP, this is present on your mobile then the relay 1 & relay 4 gets ON, so the motor rotates in forward direction. And if when we press DOWN from mobile the relay 2 & relay 3 gets ON then the motor rotates in backward direction.
All Projects, Automation Projects, Sensor Based Projects, Android Projects, Arduino Projects, Mechanical Projects, Power Electronics, Solar Based Projects, Robotics Based Projects, Mechatronics, Bluetooth Based Projects
Android Controlled Solar Grass Cutter
4.5 ★
4.5 ★
31 Ratings
5 ★
14
4 ★
17
3 ★
0
2 ★
0
1 ★
0
(31)
Highlights:
Android controlled solar grass cutter is grass cutting robot controlled by android application installed on Smartphone.
Highlights:
Android controlled solar grass cutter is grass cutting robot controlled by android application installed on Smartphone.
Automated seed sowing mechanism
4 ★
4 ★
1 Rating
5 ★
0
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(1)
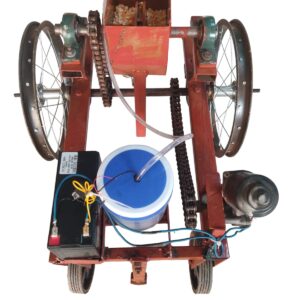
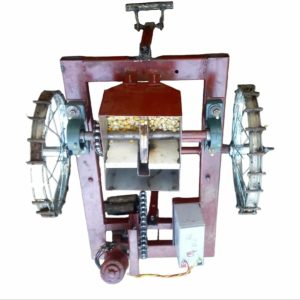
Automated Seed Sowing Mechanism
4 ★
4 ★
3 Ratings
5 ★
2
4 ★
0
3 ★
0
2 ★
1
1 ★
0
(3)
Highlights:
Presently farmers are facing shortage of labours due to growing industrialisation. To achieve required production in farms need to implement automation. This project aim at automation of manual seed sowing process. This robot consists Plough in front that digs soil. Covering plate covers seed with soil.
Highlights:
Presently farmers are facing shortage of labours due to growing industrialisation. To achieve required production in farms need to implement automation. This project aim at automation of manual seed sowing process. This robot consists Plough in front that digs soil. Covering plate covers seed with soil.
All Projects, Automation Projects, IR Based Projects, Mechanical Projects, Embedded Projects, Micro Controller, Electronic Products
AUTOMATIC CONVEYER BELT FOR WATER FILLING
4.2 ★
4.2 ★
10 Ratings
5 ★
3
4 ★
6
3 ★
1
2 ★
0
1 ★
0
(10)
Highlights:
The main objective of this project is to develop a industrial automation system conveyer belt with water filling controlled by microcontroller. As technology is advancing so industries are also getting smarter. Modern industries are gradually shifting from conventional man power to centralized control system, involving controlled system. Presently, conventional water filling located in different parts of the industries makes it difficult for the user to go near to operate.
Highlights:
The main objective of this project is to develop a industrial automation system conveyer belt with water filling controlled by microcontroller. As technology is advancing so industries are also getting smarter. Modern industries are gradually shifting from conventional man power to centralized control system, involving controlled system. Presently, conventional water filling located in different parts of the industries makes it difficult for the user to go near to operate.
All Projects, Automation Projects, Sensor Based Projects, Arduino Projects, Mechanical Projects, Mechatronics
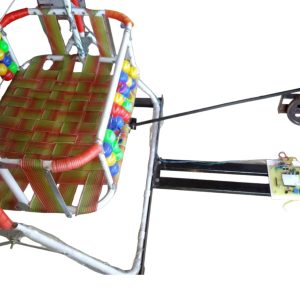
Automatic Cradle
4.6 ★
4.6 ★
20 Ratings
5 ★
11
4 ★
9
3 ★
0
2 ★
0
1 ★
0
(20)
Highlights:
In this project we have implemented concept that helps mothers. It consists of Wet sensor it senses wet bed nature and alerts mother to change bed. and Mic sensor?? which senses crying sound of child sleeping in cradle and automatically starts swinging of cradle to make calm child.
₹15,200.00 ₹17,000.00 11% Off
Highlights:
In this project we have implemented concept that helps mothers. It consists of Wet sensor it senses wet bed nature and alerts mother to change bed. and Mic sensor?? which senses crying sound of child sleeping in cradle and automatically starts swinging of cradle to make calm child.
Automatic drainage cleaning system
4.8 ★
4.8 ★
5 Ratings
5 ★
4
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(5)