









Shopping cart is empty!
All Projects, Sensor Based Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Electronic Products
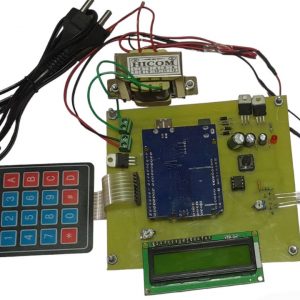
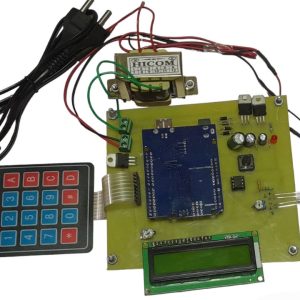
BLDC MOTOR SPEED CONTROL WITH RPM COUNT
4.5 ★
4.5 ★
10 Ratings
5 ★
5
4 ★
5
3 ★
0
2 ★
0
1 ★
0
(10)
Highlights:
In this Project, the objective is to cont control of the machineries which involving this motor can be done accurately, thus making the industrial automation production rate increased.
In the prevailing case Brushless Direct Current motor are extensively used in some of the industries because of its low cost, noise less operation, high speed torque characteristics, Speed controlling is very essential.
Highlights:
In this Project, the objective is to cont control of the machineries which involving this motor can be done accurately, thus making the industrial automation production rate increased.
In the prevailing case Brushless Direct Current motor are extensively used in some of the industries because of its low cost, noise less operation, high speed torque characteristics, Speed controlling is very essential.
Camera Surveillance Robot Using DTMF Technology
4.5 ★
4.5 ★
4 Ratings
5 ★
2
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The ???DTMF-based robot??? is controlled by a mobile phone that makes a call to another mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the other end of the call.
This tone is called ???Dual Tone Multiple-Frequency??? (DTMF) tone. The robot perceives this DTMF tone with the help of the phone stacked on the robot. The received tone is processed by the ARDUINO with the help of an IC. The ARDUINO then transmits the signal to the motor driver ICs to operate the motors. Since this robot is controlled by dialing a call so we can also call it a DTMF-controlled robot.
The transmitter section consists of another phone with a smartphone through an app called..Using a mobile phone we can generate DTMF tones which will be received by another mobile phone mounted on a robot after call connection.
The mobile phone on the robot is connected to the Arduino controller and the output or Arduino is connected to the motor driver which helps the robot to move wirelessly.
As we are using the internet the robot can be operated from any part of the world so, we need to see where the robot is moving, for which we are using the Airdroid app for monitoring through a camera inbuilt into the smartphone mounted on the robot.
Highlights:
The ???DTMF-based robot??? is controlled by a mobile phone that makes a call to another mobile phone attached to the robot. In the course of a call, if any button is pressed, a tone corresponding to the button pressed is heard at the other end of the call.
This tone is called ???Dual Tone Multiple-Frequency??? (DTMF) tone. The robot perceives this DTMF tone with the help of the phone stacked on the robot. The received tone is processed by the ARDUINO with the help of an IC. The ARDUINO then transmits the signal to the motor driver ICs to operate the motors. Since this robot is controlled by dialing a call so we can also call it a DTMF-controlled robot.
The transmitter section consists of another phone with a smartphone through an app called..Using a mobile phone we can generate DTMF tones which will be received by another mobile phone mounted on a robot after call connection.
The mobile phone on the robot is connected to the Arduino controller and the output or Arduino is connected to the motor driver which helps the robot to move wirelessly.
As we are using the internet the robot can be operated from any part of the world so, we need to see where the robot is moving, for which we are using the Airdroid app for monitoring through a camera inbuilt into the smartphone mounted on the robot.
All Projects, Sensor Based Projects, Arduino Projects, Core Electronics Projects, Electrical Projects, Electronic Products
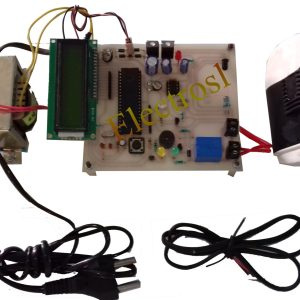
Chemical Mixture Using Arduino
4.3 ★
4.3 ★
10 Ratings
5 ★
3
4 ★
7
3 ★
0
2 ★
0
1 ★
0
(10)
Highlights:
The main aim of the project is to process the real time acquisition under arduino for large scale remote industrial environment.
In large industrial establishments many processes go on, therefore it is essential to monitor all the processes and control the factors affecting them. Adapting a technology like Arduino (Arduino controller) one can achieve the above mentioned objective effectively
Highlights:
The main aim of the project is to process the real time acquisition under arduino for large scale remote industrial environment.
In large industrial establishments many processes go on, therefore it is essential to monitor all the processes and control the factors affecting them. Adapting a technology like Arduino (Arduino controller) one can achieve the above mentioned objective effectively
All Projects, Automation Projects, Sensor Based Projects, IR Based Projects, Electrical Projects, Embedded Projects, Micro Controller
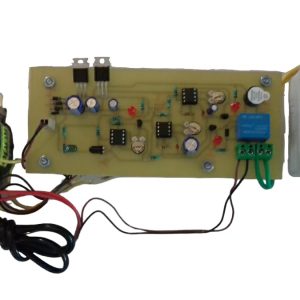
COIN BASE WATER FILLING
4 ★
4 ★
4 Ratings
5 ★
0
4 ★
4
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The main objective of this project is to develop Coin based water filling by using a microcontroller along with circuits of IR sensor which we putting the coin inside it and relay of the motor is automatically ON for particular time.
Highlights:
The main objective of this project is to develop Coin based water filling by using a microcontroller along with circuits of IR sensor which we putting the coin inside it and relay of the motor is automatically ON for particular time.
All Projects, IR Based Projects, Core Electronics Projects, Electrical Projects, Core Electrical Projects, Mini Project, School project
COIN BASED MOBILE CHARGER
4.5 ★
4.5 ★
15 Ratings
5 ★
7
4 ★
8
3 ★
0
2 ★
0
1 ★
0
(15)
Highlights:
The main objective of this project is to develop Coin based mobile charger by using a Timer IC along with circuits of IR sensor which we putting the coin inside it and relay of the charger is automatically ON for particular time.
Highlights:
The main objective of this project is to develop Coin based mobile charger by using a Timer IC along with circuits of IR sensor which we putting the coin inside it and relay of the charger is automatically ON for particular time.
All Projects, Sensor Based Projects, Arduino Projects, Electrical Projects, Solar Based Projects, Electronic Products
COIN BASED MOBILE CHARGER USING SOLAR PANEL BATTERY AND COIN SENSOR MODULE
4 ★
4 ★
2 Ratings
5 ★
0
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(2)
Crane Swing Control Over IOT
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
Crane operation is one of the most essential activities on construction sites. However, operating a crane is a sophisticated job that requires the operator to have extensive skills and experience, and most importantly a comprehensive understanding of crane motions.
Besides typical crane motions such as boom slew, hoist, and extension, monitoring and controlling the position of the load is extremely important to avoid struck-by accidents caused by crane load, especially when the load swings as a result of wind and inertia.
Although typical motions can be captured by some existing techniques, a reliable approach to position the load and monitor the load sway remains missing.
This study proposes an orientation-based approach for tracking crane load position and monitoring load sway in daily lifting activities. This approach adopts an omeasuring load orientation, and an efficient algorithm for converting orientation measurements to load positions.
The proposed approach was tested in two load sway scenarios in a controlled lab environment. Test results indicate that the proposed approach correctly converted orientation measurements to accurate load positions and reconstructed the load sway trajectory in both linear and circular sway motions. Enabling continuously monitoring of crane load motion,
??
Highlights:
Crane operation is one of the most essential activities on construction sites. However, operating a crane is a sophisticated job that requires the operator to have extensive skills and experience, and most importantly a comprehensive understanding of crane motions.
Besides typical crane motions such as boom slew, hoist, and extension, monitoring and controlling the position of the load is extremely important to avoid struck-by accidents caused by crane load, especially when the load swings as a result of wind and inertia.
Although typical motions can be captured by some existing techniques, a reliable approach to position the load and monitor the load sway remains missing.
This study proposes an orientation-based approach for tracking crane load position and monitoring load sway in daily lifting activities. This approach adopts an omeasuring load orientation, and an efficient algorithm for converting orientation measurements to load positions.
The proposed approach was tested in two load sway scenarios in a controlled lab environment. Test results indicate that the proposed approach correctly converted orientation measurements to accurate load positions and reconstructed the load sway trajectory in both linear and circular sway motions. Enabling continuously monitoring of crane load motion,
??
All Projects, Rain Sensor Based Projects, IOT Projects, LDR Sensor Based Projects, Thermistor Sensor Based Projects, DHT Sensor Based Projects, Soil Moisture Sensor Based Projects, Core Electronics Projects, Electrical Projects, Temprature Based Projects, Electronic Products
CROP PROTECTION SYSTEM USING ADVANCED ARDUINO AND IOT BLYNK APP TECHNOLOGY
5 ★
5 ★
2 Ratings
5 ★
2
4 ★
0
3 ★
0
2 ★
0
1 ★
0
(2)
All Projects, Core Electronics Projects, Electrical Projects, Temprature Based Projects, Core Electrical Projects, Electronic Products
Dc Motor Rotation In The Clock Wise And Anti Clock Wise Direction Using Rf Remote
4.6 ★
4.6 ★
5 Ratings
5 ★
3
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(5)
Highlights:
DC Motors are commonly used in electronics and electrical projects. It may be a line-following robot, a remote-controlled car, electronic shutters and doors, digital locks, drones, and choppers, etc; the DC motors are used in a variety of applications. This project is a simple demonstration of remote controlling a DC motor by switching it on or off and changing the direction of its rotation clockwise or anticlockwise
Highlights:
DC Motors are commonly used in electronics and electrical projects. It may be a line-following robot, a remote-controlled car, electronic shutters and doors, digital locks, drones, and choppers, etc; the DC motors are used in a variety of applications. This project is a simple demonstration of remote controlling a DC motor by switching it on or off and changing the direction of its rotation clockwise or anticlockwise
DC MOTOR SPEED CONTROL
4.3 ★
4.3 ★
3 Ratings
5 ★
1
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
The project is designed to control the speed of a DC motor using an 8051 series microcontroller. The speed of DC motor is directly proportional to the voltage applied across its terminals. Hence, if voltage across motor terminal is varied, then speed can also be varied.
Highlights:
The project is designed to control the speed of a DC motor using an 8051 series microcontroller. The speed of DC motor is directly proportional to the voltage applied across its terminals. Hence, if voltage across motor terminal is varied, then speed can also be varied.
All Projects, Android Projects, Electrical Projects, Embedded Projects, Micro Controller, Bluetooth Based Projects
DC MOTOR SPEED CONTROL BY ANDROID APPLICATIONS
4.3 ★
4.3 ★
4 Ratings
5 ★
1
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The project is designed to control the speed of a DC motor using an 8051 series microcontroller with android application device. The speed of DC motor is directly proportional to the voltage applied across its terminals. Hence, if voltage across motor terminal is varied, then speed can also be varied.
Highlights:
The project is designed to control the speed of a DC motor using an 8051 series microcontroller with android application device. The speed of DC motor is directly proportional to the voltage applied across its terminals. Hence, if voltage across motor terminal is varied, then speed can also be varied.
All Projects, Electrical Projects, Core Electrical Projects, Power Electronics, Mini Project, School project
DC MOTOR SPEED CONTROL USING 555 TIMER IC
4.5 ★
4.5 ★
15 Ratings
5 ★
8
4 ★
7
3 ★
0
2 ★
0
1 ★
0
(15)
Highlights:
This project is designed to control the speed of a DC motor using PWM control using 555 IC. The speed of the DC motor is directly proportional to the voltage applied across its terminals. Hence, if the voltage across the motor terminal is varied, then the speed can also be varied.
Highlights:
This project is designed to control the speed of a DC motor using PWM control using 555 IC. The speed of the DC motor is directly proportional to the voltage applied across its terminals. Hence, if the voltage across the motor terminal is varied, then the speed can also be varied.