











Shopping cart is empty!
All Projects, Automation Projects, Android Projects, Mechanical Projects, Robotics Based Projects, Mechatronics
360 Degree Steering Mechanism
4.8 ★
4.8 ★
4 Ratings
5 ★
3
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
Main objective of this project is to develop a steering mechanism that vehicle will be steered at single position.
₹17,000.00 ₹20,000.00 15% Off
Highlights:
Main objective of this project is to develop a steering mechanism that vehicle will be steered at single position.
All Projects, Electrical Projects, Mechanical Projects, Embedded Projects, Micro Controller, Mechatronics
ADVANCE CAR JACK CONTROLLED BY RF WIRELESS DEVICE
4.5 ★
4.5 ★
12 Ratings
5 ★
6
4 ★
6
3 ★
0
2 ★
0
1 ★
0
(12)
Highlights:
The project is designed to control the direction of car jack by using a RF technology for remote operation with a transmitter and receiver. The direction of the DC motor is depending on signal which is coming from transmitter. Hence, if the relay 1 & relay 4 gets ON then the motor rotates in forward direction. And if relay 2 & relay 3 gets ON then the motor rotates in backward direction.
Highlights:
The project is designed to control the direction of car jack by using a RF technology for remote operation with a transmitter and receiver. The direction of the DC motor is depending on signal which is coming from transmitter. Hence, if the relay 1 & relay 4 gets ON then the motor rotates in forward direction. And if relay 2 & relay 3 gets ON then the motor rotates in backward direction.
All Projects, Alcohol Sensor Based Projects, Sensor Based Projects, Arduino Projects, Robotics Based Projects, Mechatronics
ALCOHOL DETECTION BASED SPEED CONTROL OF VEHICLE
4 ★
4 ★
2 Ratings
5 ★
1
4 ★
0
3 ★
1
2 ★
0
1 ★
0
(2)
Highlights:
The main aim of this project is to alcohol detection based speed control of vehicle measure alcohol level without any contact and determine its level using alcohol sensor.
Highlights:
The main aim of this project is to alcohol detection based speed control of vehicle measure alcohol level without any contact and determine its level using alcohol sensor.
All Projects, Sensor Based Projects, Arduino Projects, Communication, Mechanical Projects, Electronic Products, Mechatronics
ANDROID CONTROL SOLAR PANEL CLEANING ROBOT
4.4 ★
4.4 ★
5 Ratings
5 ★
2
4 ★
3
3 ★
0
2 ★
0
1 ★
0
(5)
All Projects, Android Projects, Power Electronics, Embedded Projects, Robotics Based Projects, Mechatronics, Bluetooth Based Projects
ANDROID CONTROLLED ROBOT
4.8 ★
4.8 ★
4 Ratings
5 ★
3
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
The project is designed to control the ROBOT by using a Android technology for remote operation using an transmitter as smart phone and receiver as Bluetooth device. The direction of the DC motor is directly proportional to the voltage applied across its terminals.
Highlights:
The project is designed to control the ROBOT by using a Android technology for remote operation using an transmitter as smart phone and receiver as Bluetooth device. The direction of the DC motor is directly proportional to the voltage applied across its terminals.
All Projects, Automation Projects, Sensor Based Projects, Android Projects, Arduino Projects, Mechanical Projects, Power Electronics, Solar Based Projects, Robotics Based Projects, Mechatronics, Bluetooth Based Projects
Android Controlled Solar Grass Cutter
4.5 ★
4.5 ★
31 Ratings
5 ★
14
4 ★
17
3 ★
0
2 ★
0
1 ★
0
(31)
Highlights:
Android controlled solar grass cutter is grass cutting robot controlled by android application installed on Smartphone.
Highlights:
Android controlled solar grass cutter is grass cutting robot controlled by android application installed on Smartphone.
All Projects, Automation Projects, Sensor Based Projects, Arduino Projects, Mechanical Projects, Mechatronics
Automatic Cradle
4.6 ★
4.6 ★
20 Ratings
5 ★
11
4 ★
9
3 ★
0
2 ★
0
1 ★
0
(20)
Highlights:
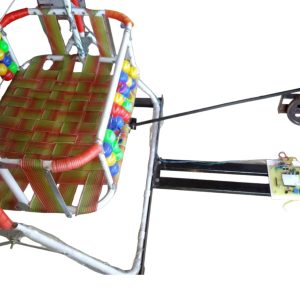
In this project we have implemented concept that helps mothers. It consists of Wet sensor it senses wet bed nature and alerts mother to change bed. and Mic sensor?? which senses crying sound of child sleeping in cradle and automatically starts swinging of cradle to make calm child.
₹15,200.00 ₹17,000.00 11% Off
Highlights:
In this project we have implemented concept that helps mothers. It consists of Wet sensor it senses wet bed nature and alerts mother to change bed. and Mic sensor?? which senses crying sound of child sleeping in cradle and automatically starts swinging of cradle to make calm child.
Battery Operated Power Weeder Machine
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
In this project we have T shaped chassis on the limb of “T” We have mounted driving wheel of 30 cm dia. Driven by appropriate sprocket mounted on shaft between bearing blocks. On T driving motor is mounted and it is connected through chain. Three teeth plough is fabricated and attached to main frame. Plough has given adjustment facility so that depth of ploughing can be controlled. At rear end two support wheels are mounted. Motor is connected to battery through speed controller circuit and speed is controlled by throttle handle given in the form of cart handle.
₹18,000.00 ₹20,000.00 10% Off
Highlights:
In this project we have T shaped chassis on the limb of “T” We have mounted driving wheel of 30 cm dia. Driven by appropriate sprocket mounted on shaft between bearing blocks. On T driving motor is mounted and it is connected through chain. Three teeth plough is fabricated and attached to main frame. Plough has given adjustment facility so that depth of ploughing can be controlled. At rear end two support wheels are mounted. Motor is connected to battery through speed controller circuit and speed is controlled by throttle handle given in the form of cart handle.
Battery Operated Tiller Machine
4.7 ★
4.7 ★
3 Ratings
5 ★
2
4 ★
1
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
In this project we have implemented automation in agricultural tilling process. Tilling process includes removing unwanted weeds from farm and also sand needs to be perforated?? so that atmospheric air flows through sand. Here we have designed a single wheel cart that is driven by motor with battery. This cart pulls tiller tool as directed by operator.
₹18,000.00 ₹19,000.00 5% Off
Highlights:
In this project we have implemented automation in agricultural tilling process. Tilling process includes removing unwanted weeds from farm and also sand needs to be perforated?? so that atmospheric air flows through sand. Here we have designed a single wheel cart that is driven by motor with battery. This cart pulls tiller tool as directed by operator.
COLOUR BASED SORTING SYSTEM
4.5 ★
4.5 ★
4 Ratings
5 ★
2
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(4)
Highlights:
For sorting object in industry optical sorting is very much convenient. Colour and size are the most important features for accurate classification and sorting of product which can be done by using some optical sensors. The colour sorting machine is mainly a device that can sense the different colour of the object and assert them into their respective location.
Highlights:
For sorting object in industry optical sorting is very much convenient. Colour and size are the most important features for accurate classification and sorting of product which can be done by using some optical sensors. The colour sorting machine is mainly a device that can sense the different colour of the object and assert them into their respective location.
All Projects, IR Based Projects, Embedded Projects, Mini Project, School project, Robotics Based Projects, Mechatronics
EDGE AVOIDANCE ROBOT BY ARDUINO
4.3 ★
4.3 ★
3 Ratings
5 ★
1
4 ★
2
3 ★
0
2 ★
0
1 ★
0
(3)
Highlights:
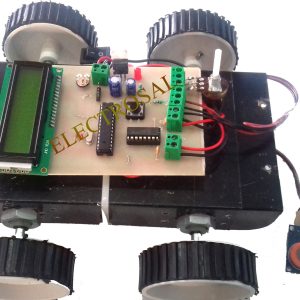
The project is designed to build an obstacle avoiding robotic vehicle using IR sensors for robotic movement. An Arduino development is used to achieve the desired operation.
Highlights:
The project is designed to build an obstacle avoiding robotic vehicle using IR sensors for robotic movement. An Arduino development is used to achieve the desired operation.
All Projects, Android Projects, Micro Controller, Robotics Based Projects, Mechatronics, Bluetooth Based Projects
Fire Fighting Robot Remotely Operated by Android Applications
4.4 ★
4.4 ★
15 Ratings
5 ★
7
4 ★
7
3 ★
1
2 ★
0
1 ★
0
(15)
Highlights:
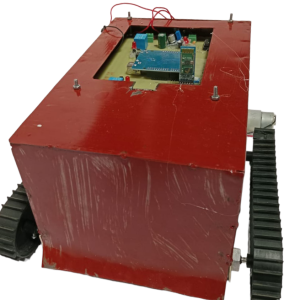
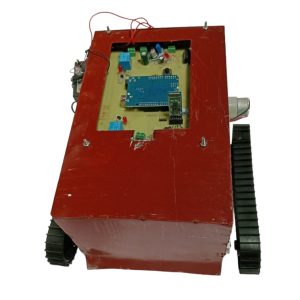
The main goal of this project is to develop a robotic vehicle which is used to find and fight fire remotely through Android application in an event of any major fire hazard particularly in industries.
Highlights:
The main goal of this project is to develop a robotic vehicle which is used to find and fight fire remotely through Android application in an event of any major fire hazard particularly in industries.