






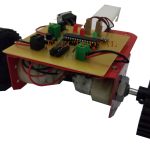




The project is designed to build an obstacle avoiding robotic vehicle using IR sensors for robotic movement. An Arduino development is used to achieve the desired operation.
A robot is a machine that can perform some task automatically or with guidance. Robotics is generally a combination of computational intelligence and physical machines (motors). Computational intelligence involves programmed instructions. The project proposes robotic vehicle that has an intelligence built in it such that it guides itself whenever an edge comes ahead of it. This robotic vehicle is built, using a micro-controller of Atmel family of Arduino Board. An IR sensor unit is used to detect Edge ahead of it that sends a command to the Arduino Board. Depending on the input signal received, the microcontroller redirects the robot to move in an alternate direction by appropriately actuating the motors interfaced to it through a motor driver IC.
This concept in future can be extended in such a way that if a destination is fed to the robot, the robot can map the whole terrain and can reach its destination by deciding a suitable path avoiding edges.
EDGE AVOIDANCE ROBOT BY ARDUINO
Note =Edge avoidance robot by Arduinois project of the last year engineering project, diploma final year engineering project. This project is used for the school students. This project is mini project. This project is last year mechatronics engineering department students.
Edge avoidance robot by Arduino is the project of good price for the engineering and school projects.It is vary comparative school and engineering project. It is a project are arduino based project. For the project is sensors based project. This project is robotics based project.
The engineering projects give in the ELECTROSAL HI- TECH PVT.LTD. The best place for the school,degree and diploma final year engineering projects as well as for mechatronics students??? final year for the golden opportunity.
Edge avoidance robot by Arduinois an easy project and idea for the mechatronics students and diploma base students & 100% output is done.
HIGHLIGHTS
- Edge avoiding robotic vehicle using IR sensor
- Robot is perform a task automatically
- computational intelligence involved programed instruction
BLOCK DIAGRAM

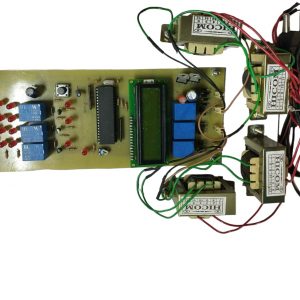
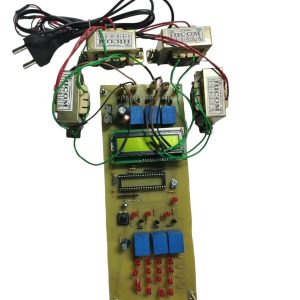
HARDWARE REQUIREMENTS
- Arduino
- Motor Driver IC
- Motors
- IR Sensor
- 12v Battery
SOFTWARE REQUIREMENTS
- Arduino
- Eagle
- proteus













Surajit patel –
I bought this project from electrosal. This a very nice project.
Alag kula mark –
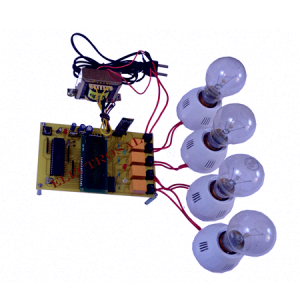
The project having One ready made kit and another one PCB and their required components. So, i have got a great Experience. And also Practical Knowledge about this project. The Documentations clear all my Doubts and also video call support from the electrosal team.
Dipika Misal –
Nice service and product range is good, also quality project are available. All information is available on website